Chapter 1: Processes
Processes and Threads
Processes #
A process is an instance of a program in runtime.
Multiprogramming #
Multiprogramming is a technique that Operating Systems provide that makes the CPU switch between different processes to simulate concurrency.
Process Creation #
General-purpose systems need some form of process creation and termination during its operation.
The ff. are important events that causes processes to be created:
- During system initialization.
- Execution of a process-create system call by a running process.
- A user request to create a new process.
- Initiation of a batch job.
In UNIX, the fork system call creates a clone of the calling process.
The forked process is called the child process while the process that called fork
is the parent process.
The parent and child processes shares the state of the parent process.
Process Termination #
As processes get started they also must be terminated. Usually termination occurs in the ff. conditions:
- Normal exit (voluntary)
- Error exit (voluntary)
- Fata error (involuntary)
- Killed by another process (involuntary)
In UNIX, the exit system call is used to tell the Operating System that the process is
going to be terminated.
There is also the kill system call in UNIX that terminates another process.
Process Hierarchies #
In UNIX, when the computer is booted, a special process called init is present in the boot image.
When it starts running, it reads a file telling it how many terminals there. Then it forks off a new process per terminal.
These processes wait for someone to login, and, if successful, the login process executes a shell to accept commands.
These commands may start up more processes and so forth.
Thus, all processes in the whole system belong to a single tree, with init at the root.
Process States #
A process can be in three states:
- Running - actually using the CPU at that instance.
- Ready - runnable; temporarily stopped to let another process run.
- Blocked - unable to run until some external event happens.
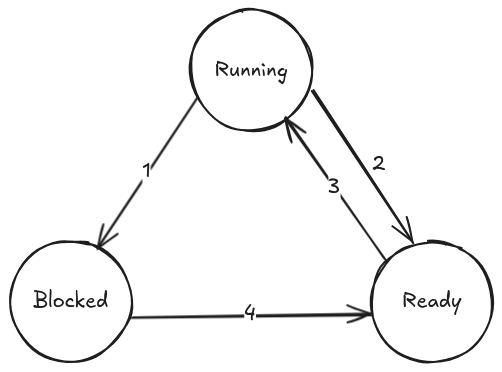
There are transitions for each process state:
- Transition occurs when the OS discovers that a process cannot continue right now.
- Transition when the scheduler picks another process to run.
- Transition occurs when the scheduler picks this process to run.
- Transition occurs when the event that a process was waiting for has become available.
Process Tables #
The process table (sometimes called the process control blocks) is an array of structures that contains important information about the process' state.
Interrupt Vector #
The interrupt vector contains the address of the interrupt service procedure which the CPU switches to when an interrupt occurs.
Threads #
A thread is a unit of work within a process. Processes can have or more threads that can help it do its job.
Threads share the same address space as its controlling process and are independent from one another (ie. they each have their separate state such as registers and stack).
Each thread in a process gets run the same way processes gets ran by the CPU: switching between each of them, albeit in a much slower manner.
| Per-process items | Per-thread items |
|---|---|
| Address space | Program counter |
| Global variables | Registers |
| Open files | Stack |
| Child processes | State |
| Pending alarms | |
| Signals and signal handlers | |
| Accounting information |
The difference between a child process and a thread is that a child process inherits (or gets a copy) of the process' state but they do not share, whilst a thread shares some of the state of the process.
POSIX Threads #
POSIX threads or pthreads is a portable, standard definition for threads.
The ff. are calls that can be done for basic thread handling:
| Thread Call | Description |
|---|---|
pthread_create |
Create a new thread |
pthread_exit |
Terminate the calling thread |
pthread_join |
Wait for a specific thread to exit |
pthread_yield |
Release the CPU to let another thread run |
pthread_attr_init |
Create and initialize a thread's attribute structure |
pthread_attr_destroy |
Remove a thread's attribute structure |
User, Kernel, and Hybrid Threads #
Threads are implemented either on the user-space, on the kernel-space, or in both.
User-Space Threads (Green Threads) #
User-space threads (or sometimes called green threads) are implemented with a run-time which is a collection of procedures that manages threads.
When threads are managed in user-space, each process needs its own thread table which is similar to the process table, except that it keeps track of only the per-thread properties (ie. registers, stacks, program counter, etc.).
The scheduling, thread table, thread states are managed by the run-time system.
The ff. are advantages and disadvantages of user-space threads:
Advantages #
- User level threads can be used on operating systems that do not support them
- User level threads can be implemented with a custom scheduling algorithm
- No system calls needed as only user-level procedures are required to manage the threads.
Disadvantages #
- A thread making a blocking system call will halt all the threads in the thread table.
- Cannot be used in multi-processor systems.
- No clock-interrupts that hand over the processing to the run-time system.
Kernel-Space Threads (Native Threads) #
Kernel-space threads (or native threads) are implemented within the operating system.
In this type of thread, the kernel maintains the thread table.
When a thread creates or destroys a thread it makes a system call.
Advantages #
- Scheduling is managed by the kernel
- Can be used in multi-processor systems.
- A blocking system call will not halt all the threads in the thread table.
Disadvantages #
- Slower
Interprocess Communication (IPC) #
Interprocess Communication is the mechanism that allows two or more processes to communicate with one another.
Race Conditions #
Race conditions are situations in which two or more processes are reading or writing to some shared data and the final result depends on who runs precisely when.
Critical Regions #
A part of the program where shared memory is accessed.
Mutual Exclusion #
A concurrency control mechanism that only allows processes to access shared data one at a time.
Techniques for achieving Mutual Exclusion #
Disabling Interrupts #
Disabling interrupts in guarantees that the process never gets descheduled and be abruptly stopped before it reads/writes to its critical region.
Problems
-
Dangerous as giving the process control over interrupts can lead to processes being programmed to never give up CPU time.
-
Only works on single CPU environments. Multiprocessor machines will still be able to interact with some process' critical region.
Lock Variables #
Locks variables are shared variables between two or more processes that checks if a
critical region is being accessed by looking at a value of variable: 0 means the
no processes are using the critical region, 1 that a process is using the critical
region.
Problems
- Processes getting descheduled will still have the original problem of race conditions as it is still possible for a process to be descheduled before it writes to the lock variable.
Spin Locks (Busy Waiting) #
A spin lock is a variable that gets checked and, if true, continuously loops rendering other processes to be unable to access the critical region.
void process_a() {
while (1) {
while (turn != 0); // Continuously loop when something is still accessing the critical region.
critical_region();
turn = 1;
}
}
void process_b() {
while (1) {
while (turn != 1); // another spin lock.
critical_region();
turn = 0;
}
}Problems
- CPU intensive.
- Can block other processes despite them not being in their critical region.
Peterson's Solution #
Semaphores #
A semaphore is a non-negative variable shared between processes (or threads) and is only
accessible through its atomic operations: down() and up() which decrements and
increments the semaphore variable respectively.
In order for the semaphore operations to be atomic, they have to be implemented as a syscall that disables interrupts momentarily while they are executing.
Mutexes #
A mutex is a shared variable that can be in one of two states: unlocked or locked.
When a thread or process needs access to a critical region, it calls mutex_lock.
If the mutex is already locked, the calling thread or process is blocked until the thread
or process in the critical region is finished and calls mutex_unlock.
If multiple threads or processes are blocked on the mutex, one of them is chosen at random and allowed to acquire the lock.
A mutex can be easily implemented in user space provided that machine-level instructions for locks (ie.
TSLorXCHG) are available.
Monitors #
A monitor is a collection of procedures, variables, and data structures that are all grouped together in a special kind of module or package.
Monitors are a programming language concept.
Avoiding Locks (Read-Copy-Update) #
Read-Copy-Update (RCU) is a lock-free synchronization mechanism.
This works by ensuring that threads or processes read or write either an old or new version of the data, but not both.
Read more of this in Wikipedia.